A disputa prevê o uso de robôs para auxiliar pessoas com algum tipo de limitação em tarefas rotineiras; as provas foram disputadas por 56 universidades de 17 países
Equipe do Advanced Robotics Laboratory (AdRoLab) da Unicamp, em parceria com o Hub de Inteligência Artificial e Arquiteturas Cognitivas (H.IAAC), conquistou o primeiro lugar no PhyRC Challenge. Trata-se de uma competição internacional na área de robótica assistiva, que usa robôs para auxiliar pessoas com algum tipo de limitação em tarefas rotineiras.
Disputado por 56 universidades de 17 países, o Brasil foi o único país do Sul Global a participar da competição. Essa é a primeira vez que uma equipe da Unicamp concorre, estando ao lado de instituições de renome internacional, a exemplo da Universidade de Stanford, de Yale, de Cambridge, entre outras.
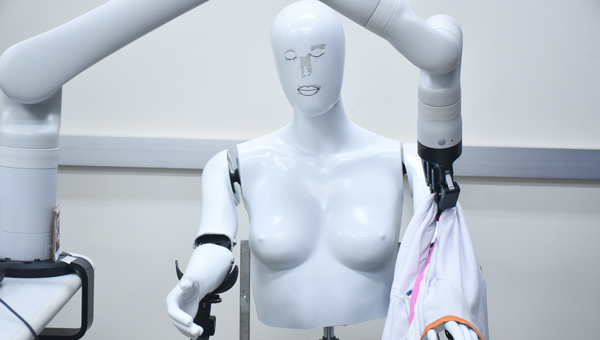
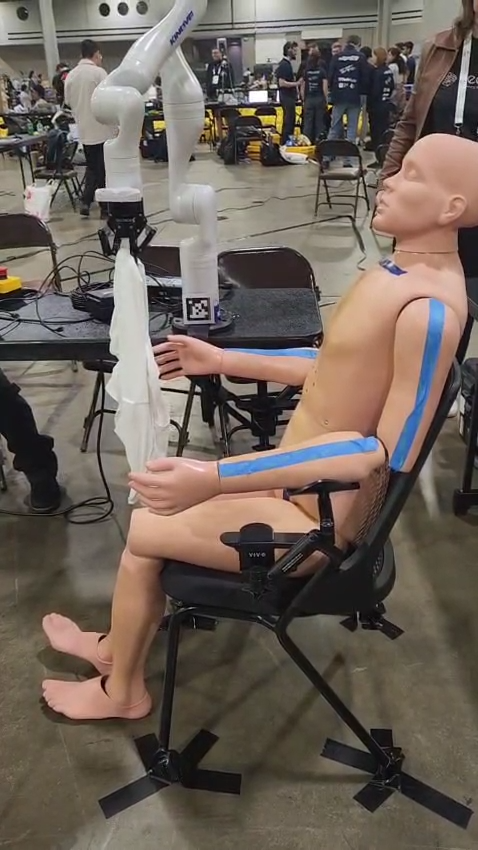
O PhyRC Challenge – organizado pelo EmPRISE Lab (laboratório da Universidade Cornell, Estado Unidos) e patrocinado pela empresa Kinova – teve duas etapas. A primeira consistiu em uma simulação virtual do processo de vestir um jaleco em um manequim usando apenas um manipulador robótico. Já a segunda propôs o desafio de vestir uma camisa em um manequim real durante a IEEE International Conference on Robotics and Automation 2025, o maior evento internacional na área de robótica, realizado em maio nos Estados Unidos. “É um desafio grande, até para um ser humano é difícil [vestir uma camisa usando um braço só]. Essa parte física da inteligência artificial é complicada, porque a tecnologia ainda não está pronta para resolver esse tipo de situação”, afirmou Eric Rohmer, docente da Faculdade de Engenharia Elétrica e de Computação (Feec), pesquisador do H.IAAC e líder do AdRoLab.
O resultado foi uma surpresa para a equipe, que enfrentou dificuldades até encontrar uma abordagem promissora. Após explorarem as técnicas mais atuais de aprendizado de máquina (“machine learning”) sem sucesso, a solução foi apostar em uma proposta híbrida, por meio do Modelo de Mistura Gaussiana (MMG) – mesclando a robótica moderna baseada em inteligência artificial (IA) e a metodologia robótica anterior, baseada em modelos matemáticos.
A diferença está no treinamento do robô para executar a tarefa. Enquanto a IA exige um grande volume de dados, por meio do MMG, bastaram cinco demonstrações para o robô ser capaz de realizar a ação. “Rodamos um algoritmo que vai lendo a posição do manipulador enquanto literalmente pegamos a camisa e fazemos o manipulador ir vestindo tudo. Jogamos essas demonstrações no MMG, que modela esses dados”, explicou Maria Fernanda Paulino Gomes, mestranda que teve a ideia de aplicar a técnica e baseará sua dissertação nela.
No momento de vestir a camisa, o modelo analisa a posição do robô e usa probabilidade para determinar qual o caminho com maior chance de acerto, usando dados de todas as trajetórias aprendidas. A solução inovadora foi o que garantiu a maior pontuação para a equipe brasileira, que, durante a competição, conseguiu vestir um braço e a cabeça do manequim.
A metodologia também permitiu replicar, nos Estados Unidos, as condições dos testes feitos com o manequim no Brasil, sem necessidade de muitas alterações. “Essa tecnologia é muito promissora para a robótica atual, é uma contribuição que se esperaria em um pós-doutorado”, ressaltou Rohmer.
Para Paula Dornhofer Paro Costa, docente da FEEC e coordenadora da linha de pesquisas em Arquiteturas Cognitivas do H.IAAC, a capacidade de improvisar soluções para os problemas foi um diferencial da equipe. O manequim usado nos testes, por exemplo, foi adaptado de um modelo para lojas de roupas. A participação na competição contou com o apoio da Pró-reitoria de Pesquisa. “Participar da conferência nos deu a oportunidade de acompanhar as tendências tecnológicas e entender para onde estão se direcionando”, ressaltou Costa.
Também fizeram parte da equipe vencedora Elton Cardoso do Nascimento, Ervin Bolivar Huayhua, Esther Luna Colombini e Leonardo Rocha Olivi (Universidade Federal de Juiz de Fora).
Inteligência artificial física
A chamada “inteligência artificial física” integra a IA a robôs capazes de interagir com o mundo, usando sensores para fazer a leitura do ambiente. Esses robôs inteligentes são úteis no contexto de uma população mundial cada vez mais envelhecida e carente de cuidados. “Esse prêmio reconhece a expertise da Unicamp nessa área da robótica assistiva, que é importante e precisa de mais investimentos”, destacou Costa.
Segundo Rohmer, o desafio da competição se encaixa com algumas das pesquisas que o AdRoLab vem desenvolvendo: robótica assistiva voltada para mobilidade e manipulação, utilizando cadeira de rodas robotizada e exoesqueleto de membros inferiores. O resultado satisfatório com o Modelo de Mistura Gaussiana motivou o laboratório a explorar novas pesquisas com essa metodologia híbrida, abrindo um novo leque de estudos. “A IA é o futuro, mas ainda fazemos coisas com técnicas de robótica de 50, 60 anos atrás. Trabalhamos com o H.IAAC para fazer uma mudança suave dos paradigmas antigos para os mais recentes dentro da physical AI [IA física]”, defendeu Rohmer.
Ao ganhar a competição, o AdRoLab irá receber mais um manipulador da marca Kinova. “Continuaremos nessa direção para finalizar o desafio e apresentar uma possibilidade de vestir uma pessoa com deficiência, um idoso, a partir de um manipulador”, disse o pesquisador.
Um dos obstáculos a ser superado é a capacidade da máquina de identificar o estado da camisa – se está torta, amassada etc. – e fazer os ajustes necessários para vestir o manequim. Para isso, a equipe trabalha também com uma câmera que identifica a posição do corpo e da roupa. “Pintamos a camiseta [que era totalmente branca] para o robô conseguir detectá-la automaticamente. Isso não foi usado para a competição, mas no futuro iremos utilizar”, contou César Bastos da Silva, doutorando e membro da equipe vencedora.
A expectativa é integrar o manipulador aos demais robôs focados em mobilidade, colocando-o em cima da cadeira de rodas, por exemplo. “Queremos que o cadeirante consiga se deslocar, mas também interagir com objetos do dia a dia. E, quando a pessoa não estiver na cadeira, podemos usá-la como um robô de serviço, que vai ajudá-la com tarefas como se vestir ou lavar a louça de forma automatizada, sem necessidade de supervisão ou ordem de um ser humano”, exemplificou Rohmer.
CRÉDITO/IMAGEM: A área de robótica assistiva é definida pelo uso de robôs para auxiliar pessoas com algum tipo de limitação em tarefas rotineiras
Fonte: https://jornal.unicamp.br/







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}